
- Joined
- Dec 21, 2020
- Messages
- 7
- Reaction score
- 1
Hi, i have been working on a tello interface for the past half a year for my finale year project and tommorow we have presentation for the parents and other students and I really want to do a live performence but I still have 1 major problem relating to the frames while using a Yolov3 object detection model.
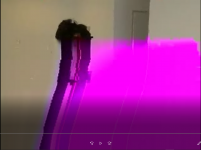
frame gets really corrupted.
This only happens when I am using a new model that I started using lately. The frames get really corrupted with frozen pixels and purple pixels in the bottom. The thing is that when I run only the useage of this model on my laptop's camera is works extremly smoothly. The usage of the model itself is made in a thread to prevent the long time it takes to execute from slowing the main code. I really can't stop using this model so I really need help finding a solution.
Also to note, even if i display a copy of the frame that the drone first gives (without rectangles on it and without touching it just copy from when i get the frame and then display) the frame is still corrupted.
again anything could help thank you so much for your time and have a nice day all !
I am attaching a very beautiful picture of me just so you can get the idea of what I mean by corrupted, thank again <3
In case it matters this is my ffmpeg command -
CMD_FFMPEG = (f'ffmpeg -hwaccel auto -hwaccel_device opencl -i pipe:0 '
f'-pix_fmt bgr24 -s {FRAME_X}x{FRAME_Y} -f rawvideo pipe:1 ')
EDIT:
I already did the presentation.. but if anyone knowns how to fix that i would still love to know!!!
frame gets really corrupted.
This only happens when I am using a new model that I started using lately. The frames get really corrupted with frozen pixels and purple pixels in the bottom. The thing is that when I run only the useage of this model on my laptop's camera is works extremly smoothly. The usage of the model itself is made in a thread to prevent the long time it takes to execute from slowing the main code. I really can't stop using this model so I really need help finding a solution.
Also to note, even if i display a copy of the frame that the drone first gives (without rectangles on it and without touching it just copy from when i get the frame and then display) the frame is still corrupted.
again anything could help thank you so much for your time and have a nice day all !
I am attaching a very beautiful picture of me just so you can get the idea of what I mean by corrupted, thank again <3
In case it matters this is my ffmpeg command -
CMD_FFMPEG = (f'ffmpeg -hwaccel auto -hwaccel_device opencl -i pipe:0 '
f'-pix_fmt bgr24 -s {FRAME_X}x{FRAME_Y} -f rawvideo pipe:1 ')
EDIT:
I already did the presentation.. but if anyone knowns how to fix that i would still love to know!!!
Attachments
Last edited: