
- Joined
- May 18, 2022
- Messages
- 6
- Reaction score
- 0
I am currently using 5 DJI Tello Drones to gather data on different drone formations as part of a research project, and we are trying to track their energy consumption. Does anyone know of any way for the drones to send back data on voltage. We've tried plotting battery percentage data but we aren't sure how often the drones update their battery percentage, and the decrease doesn't appear to be consistent across drones. I have included our battery percentage data as an example.
(left diagram: the drones ran for a minute hovering, right diagram: the drones hovered, moved forward by 1 metre, and landed.)
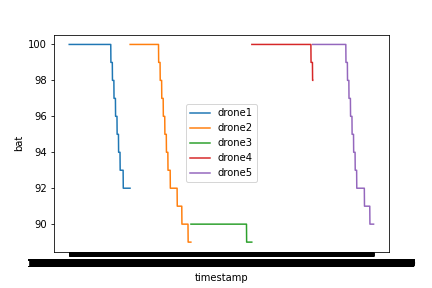
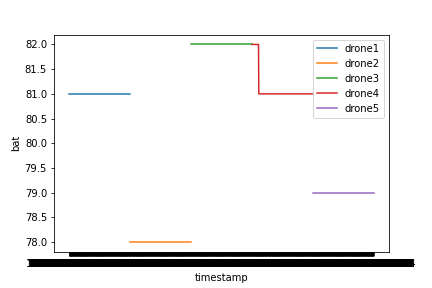
(Each colour is a different drone)
Any feedback would be helpful!
Thank you!
(left diagram: the drones ran for a minute hovering, right diagram: the drones hovered, moved forward by 1 metre, and landed.)
(Each colour is a different drone)
Any feedback would be helpful!
Thank you!
")