Hi world,
I was just wandering if you see have negative Z values (posX or TOF values) when the drone is flying.
Axis orientation is a convention, so why not setting the Z axis oriented toward ground, but this seems a little bit unusual and counter-intuitive to me.
VelZ, PosZ and TOF seems consistently defined with neg values above the ground.
I'm suspecting that I wrongly decode some bytes but this is unclear to me.
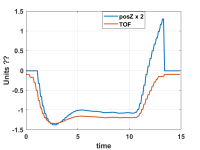
Also the TOF Sensor (index 68 in the MVO packet) deems to be roughly twice the tof sensor. Do you have any idea why and/or what are the units used?
=> cf attached image
Thanks for your help
I was just wandering if you see have negative Z values (posX or TOF values) when the drone is flying.
Axis orientation is a convention, so why not setting the Z axis oriented toward ground, but this seems a little bit unusual and counter-intuitive to me.
VelZ, PosZ and TOF seems consistently defined with neg values above the ground.
I'm suspecting that I wrongly decode some bytes but this is unclear to me.
Also the TOF Sensor (index 68 in the MVO packet) deems to be roughly twice the tof sensor. Do you have any idea why and/or what are the units used?
=> cf attached image
Thanks for your help