I parsed the state string and put the values of speed and acceleration into a spreadsheet.
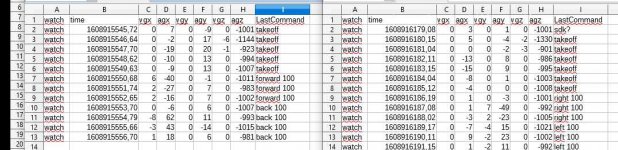
If the timing and my parsing is ok, then it looks like this (see picture).
I took one reading every second.
The first column shows the time, then come the speed and acceleration values. The last column shows the latest command I gave, so I see what
Tello is doing in this moment.
I flew forward and back in one session, left and right in the second session, always with the default speed which is 100cm/s (i.e. I did not set the speed). I did not turn, so
Tello always looked in the same direction.
Do the speed values make some kind of sense?
Positive values when I fly forward or right, negative when flying left or backwards.
The manual does not show in which unit they are given.
It took about 3 seconds to fly 1 meter. So the average speed ist about 30 cm/s.
It might be dm/s (1 dm = 10 cm for everybody who is not familiar with decimals).
And they are given in integer format which makes it at least very inaccurate.
So it does not look really useful for navigation.